進化細胞生物学研究室 Welcome to Shingyoji-Lab
研究内容
2.鞭毛の力学シグナルフィードバック特性と振動機構
ダイニン1分子に運動活性のリズムの源が潜んでいる可能性がある.かしもしそうだとしても,それが鞭毛全体の屈曲のリズムとなる過程には複雑な制御が組込まれていると予想される. この制御システムの理解には,新しい実験手法の開発がぜひとも必要である.
鞭毛の9+2構造はネクシン等の繊維構造でつなぎ止められており,通常は微小管が滑り出してくることはない.したがって,微小管間の滑り運動を見るにはそれらの繊維を壊す必要がある. しかし,これまでの手法では,それらを壊し滑りを観察できるようにすると屈曲は作られなくなるとされていた.
そこで,私たちはこれらの一見矛盾する,滑りと屈曲とを同時に誘導できるような実験手法の開発に挑戦した.その結果,ウニ精子の鞭毛を用いた独自の滑り運動解析系を開発することに成功した(Nakano et al., 2003).
この実験系は,屈曲の振動特性を維持したまま,微小管の滑り運動をも解析できる,という特徴がある.興味深いことに,この特徴こそが制御機構の本質を反映していることが最近明らかになって来た.この実験系により,図2-1にあるように,屈曲の形成に対応した滑り運動(赤矢印と青矢印)のスイッチングを解析することができるようになった.
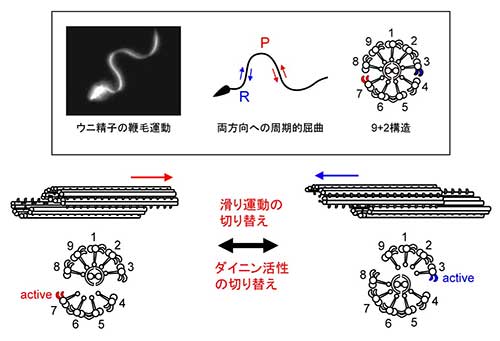
図2-1. 鞭毛の両方向の屈曲形成に重要な滑り運動とそれを担う主要なダイニンの位置
ところで,鞭毛の振動の制御には鞭毛が曲がるという屈曲シグナルそのものが運動にフィードバックされているのではないかという予想が1950年代からなされていた.しかし,その実験的証明は容易ではなかった.
我々は新しい滑り運動解析系を用い,鞭毛の一部に屈曲を与えることにより,滑りの方向が変わることを初めて証明することに成功した(Morita and Shingyoji, 2004; 図2-2).
また,別の実験で,非常に低いATP中で自律振動能を示さない除膜鞭毛に外部から変形を与えると, 振動を誘導できることを見いだした(Ishikawa and Shingyoji, 2007). このように,鞭毛には屈曲という力学情報をフィードバックし, ダイニンの活性を協調的に制御するという自励制御機構があるらしい. 現在,鞭毛運動のリズムの基礎をなす力学シグナルのフィードバック機構の解明を目指している.
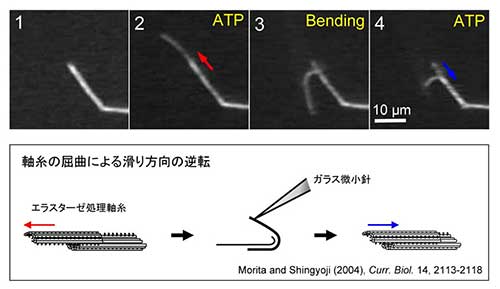
図2-2. 屈曲により滑りの方向が切り替わることを証明した実験(Current Biol., 2004)